
Nicolas Kruchten
is a data visualization specialist
based in Montreal, Canada.
Arduino
Arduino is an open-source electronics platform: basically a cheap little computer for hobby projects. I’ve used mine for building little robots and hacking my Silvia espresso machine.
Rancilio Silvia iPhone Remote Control
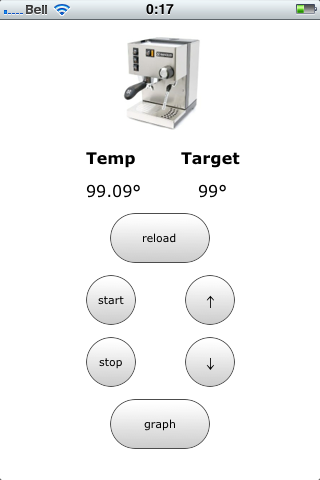
This is a screenshot of what I pull up on my iPhone every morning now after its alarm clock wakes me up. That's right, it's an interface to turn on my espresso machine so that it will warm up to a specific temperature by the time I'm done snoozing! I can even look at a real-time plot of the temperature to confirm that it's holding where it should be and doesn't need to bumped up or down a degree.
Graphing Silvia Temperature on iPad
So I finally got around to working on my Silvia Mod Plan, getting all the way to Step 5! The video above is a demo of the setup I have to show a real-time graph on my iPad of the boiler temperature in the Silvia.
Having installed the thermocouple in the Silvia and played with my TC4 shield, my initial plan was to use the Arduino to transmit data to my iMac using XBee as a wireless serial link, where I would run a NodeJS process which would read data from the USB port and which would communicate with the iPad via a WebSocket over Wifi (phew, mouthful!). Ideally the Arduino would speak Wifi but in the meantime I figured I'd play with this setup. I chose NodeJS because it seemed really easy to set up WebSockets using socket.io, and that seemed like a good way to feed data to Smoothie Charts for real-time graphing. I rewrote the code in CoffeeScript, because it's the best way to write NodeJS code IMO (a discovery I made after writing the first version of this code 4 months ago) and because it's so fitting for this project!
Silvia Mod Plan

So in October I finally bought the Rancilio Silvia I'd been coveting (after coveting a La Pavoni manual espresso machine first!) with the intention of modding it to add digital temperature control to it, as many have done. This basically involves replacing the stock thermostat with a thermocouple and solid-state relay, plugged into a digital control unit which does PID control. Now being a software guy who likes to tinker with his Arduino, I pretty quickly decided that I wouldn't use a standard industrial controller but I would build a custom one (kind of like this one, but read on for differences). In addition, I decided I didn't want to hang anything from the Silvia or make any externally-visible modifications, partly for esthetic reasons, but mostly because I'm not too good at making good-looking hardware myself. So I decided I would build something I could control wirelessly, from my iPhone for example. "Control" in this case basically means occasionally changing the set point of the controller, and maybe turning it on remotely. One other feature which would be nice would be a timed on/off feature, like "on 30min before I wake up" and "off after 1h of disuse" or something like that.
Wanderer v2, with Wireless Wii Nunchuck
After building my little autonomous wanderer robot, I saw this iPad-controlled blimp and went ahead and added iPad control to my robot too. I had a Python script on my iMac which took commands from the iPad over Wifi and relayed them to the Arduino using XBee. I demo'ed this at BitNorth 2010, but I'm not sure if the video is up yet. That said, the fact that all the commands were relayed through a 'base station' bothered me, and I saw a cheap wireless Wii Nunchuk which I immediately bought, thinking I could make it into a really ergonomic remote control for my little robot. I probably could have gotten a Wifi shield instead, but I was up for a different kind of challenge.
Arduino Wanderer v1
Back in April I got an Arduino Duemilanove and a variety of sensors and actuators, which promptly caused me to go order a rover base from RobotShop.ca,and a few days later, I had put this little guy together! Truly,Arduino is an easy-to-use platform for this sort of thing. I went on toput together an iPad-controlled version as well as a wirelessWii-Chuck-controlled version but I'll post about those later.